Trong xu thế tự động hóa ngày nay, quá trình cấp phôi trong sản xuất cơ khí giúp cải thiện hiệu quả sử dụng máy móc, nâng cao năng suất và chất lượng lao động.

1. Giới thiệu chung về cấp phôi tự động bằng Gantry robot
Hiện nay trong quá trình sản xuất, lắp ráp, kiểm tra chất lượng sản phẩm ngành công nghiệp nói chung và ngành sản xuất cơ khí nói riêng đều phát triển theo xu hướng tự động hóa ngày càng cao. Để đảm bảo quá trình sản xuất ổn định thì cần thiết phải có quá trình cung cấp phôi một cách chính xác về thời gian, không gian và liên tục theo chu kỳ một cách hệ thống và có độ tin cậy cao. Vì vậy quá trình cấp phôi là một trong những yêu cầu cấp thiết cần phải được nghiên cứu và giải quyết trong các hệ thống sản xuất tự động nhằm mục đích nâng cao năng suất, chất lượng lao động cũng như hiệu quả sử dụng máy móc.
Trong các hệ thống này, ngoài cánh tay robot, robot được cố định phía trên bề mặt cũng được sử dụng nhiều. Robot Gantry thường xuất hiện trong các dây chuyền sản xuất hàng loạt, với năng suất lớn do không bị giới hạn bởi khu vực hoạt động.

Trong các máy gia công cơ khí để tối ưu hóa trong sản xuất góp phần tăng năng suất cũng như chất lượng sản phẩm thì đối với từng loại sản phẩm sẽ có những phương pháp cấp phôi khác nhau. Cụ thể đối với máy tiện CNC thì chủ yếu có 2 phương pháp cấp phôi tự động chính đó là: Cấp phôi dạng thanh (Bar feeder) và Cấp phôi dạng chiếc (Gantry robot). Trong chủ đề này, chúng tôi xin phép giới thiệu giải pháp cấp phôi dạng Gantry robot.
2. Cấu tạo và thông số kỹ thuật
2.1. Cấu tạo

Cấu tạo chung của hệ thống bao gồm: Hệ ray dẫn hướng – truyền động, cáp điều khiển tín hiệu, tủ điều khiển và máy tính công nghiệp, các cảm biến, động cơ truyền động, tay gắp robot.
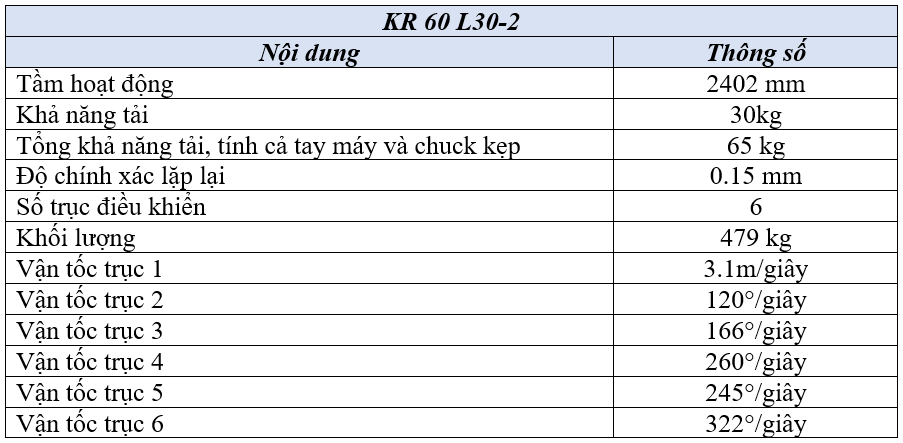
2.2. Các thông số kỹ thuật chính
3. Đặc điểm, ưu điểm và thành phần chính cấu tạo nên hệ thống
3.1. Đặc điểm:
- Hệ thống dùng để cung cấp từng phôi trong suốt quá trình gia công với kích thước cố định (mỗi sản phẩm đều có cấu tạo đầu tay gắp riêng biệt). Để hệ thống hoạt động trơn tru, chính xác thì khí nén là một yếu tố không thể thiếu trong yêu cầu của thiết bị, khí nén cần phải khô, sạch, không dính dầu, không có nước. Thời gian cấp phôi ngắn giúp tăng sản lượng gia công.
- Robot Gantry giải quyết được cả hai vấn đề là không hạn chế về quy mô, diện tích chuyển động và tiết kiệm không gian là hai đặc điểm lớn nhất của Robot Gantry và được sử dụng nhiều trong các hệ thống tự động hóa.
- Thêm vào đó, thiết kế đơn giản, chi phí hợp lý và khả năng mở rộng quy mô dễ dàng do cấu trúc mô-đun là những đặc tính đi kèm tiếp thêm sức mạnh cạnh tranh cho Robot Gantry.
3.2. Ưu điểm
- Tận dụng tối ưu đến 96% không gian lắp đặt để thực hiện các tác vụ liên quan đến bơm và tra keo, tiết kiệm không gian, thiết kế đơn giản.
- Dễ dàng mở rộng quy mô ở cả 3 chiều X, Y và Z.
- Nhờ vào cấu trúc chắc chắn nhưng gọn nhẹ, robot Gantry hoạt động rất chính xác qua nhiều chu kỳ lặp.
- Thiết kế mô-đun vì vậy có các tùy chọn phù hợp với từng ứng dụng riêng của người dùng, thêm vào đó, tiết kiệm chi phí bảo dưỡng, kiểm tra định kì.
- Kết hợp với mô-đun cảm biến hình ảnh trong một số dòng sản phẩm để tăng độ chính xác, kiểm tra sau khi gia công, loại bỏ sản phẩm NG.
3.3. Thành phần chính cấu tạo nên hệ thống
a. Hệ điều khiển KR-C4

- Bộ điều khiển KR C4 là thiết bị tiên phong cho tự động hóa.
- Nó làm giảm chi phí của bạn trong việc tích hợp, bảo trì và phục vụ. Đồng thời hiệu quả lâu dài và tính linh hoạt của các hệ thống được tăng lên – nhờ các tiêu chuẩn công nghiệp.
- Kiến trúc phần mềm KR C4 tích hợp Điều khiển Robot, Điều khiển PLC, Điều khiển chuyển động (ví dụ: KUKA.CNC) và Kiểm soát an toàn. Tất cả các bộ điều khiển chia sẻ một cơ sở dữ liệu và cơ sở hạ tầng.
- Hiệu suất cao hơn trong gia công CNC. Tùy chọn điều khiển KUKA.CNC cho phép trực tiếp lập trình và vận hành robot KUKA thông qua G-code. Nó có thể xử lý ngay cả các chương trình phức tạp nhất từ các hệ thống CAD/CAM và cung cấp độ chính xác cao nhất do mô phỏng đường dao chạy CNC. Điều này đơn giản hóa rất nhiều việc tích hợp robot vào một môi trường CNC hiện có.
b. Tay điều khiển Smart PAD

- Cho dù bạn là người mới hay chuyên gia lập trình, KUKA smartPAD sẽ nhanh chóng đưa bạn đến mục tiêu của bạn. Bởi vì nó cung cấp các tùy chọn lập trình phù hợp cho mọi yêu cầu.
- Một bảng điều khiển duy nhất để thực hiện các tác vụ đa dạng nhất một cách đáng tin cậy.
- KRL – ngôn ngữ lập trình của robot tiên tiến. “Người máy KUKA Language” là một ngôn ngữ lập trình tiêu chuẩn trên toàn cầu. Nó rất dễ học và hoàn toàn phù hợp với các tùy chọn đa dạng do rô-bốt KUKA cung cấp.
- KUKA smartPAD trực quan có thể được sử dụng để tạo các chương trình phức tạp và tùy chỉnh cho các bước chuyển động của rô-bốt và các tác vụ trong nhiều ứng dụng – cả hai trực tuyến và ngoại tuyến.
- Đơn giản và hiệu quả: lập trình với các biểu mẫu nội tuyến, các biểu mẫu để lập trình các nhiệm vụ và các bước chuyển động nhanh chóng, không có lỗi. Họ có thể được gọi thông qua menu và có sẵn như là tiêu chuẩn. Điều này đơn giản hóa việc lập trình của RoboTeams với tối đa sáu rô-bốt được đồng bộ hóa.
- Các mô-đun chương trình do khách hàng xác định. Các nhà tích hợp KUKA có thể mở rộng thư viện của các mẫu nội tuyến KUKA có sẵn theo yêu cầu của khách hàng. Điều này dẫn đến tạo các ứng dụng đặc biệt có thể dễ dàng lập trình cho các nhiệm vụ định kỳ.
- Lợi thế cạnh tranh cho các nhà tích hợp hệ thống: các biểu mẫu nội tuyến được phát triển đặc biệt cho phép các giải pháp độc đáo, phù hợp tối ưu với các công ty sử dụng chúng.
Link catalog tham chiếu: xem thêm tại đây.
Công ty chúng tôi luôn luôn mong muốn được trở thành đối tác tin cậy và là nhà cung cấp thiết bị, giải pháp hàng đầu cho sự thành thành công của Quý Khách hàng. Mọi thông tin chi tiết Quý Khách vui lòng liên hệ:
Công ty Cổ phần Công nghệ MITAS Hà Nội
Địa chỉ: Tầng 5, tòa nhà C’Land, Số 81 Lê Đức Thọ, Nam Từ Liêm, Hà Nội
Web: https://mitas.vn | ĐT: (+84) 243 8585 111 | Email: sales@mitas.vn
Sự ủng hộ tin yêu của Quý Khách hàng là động lực và tài sản vô giá đối với tập thể công ty chúng tôi. Chúng tôi xin trân trọng cảm ơn./.





